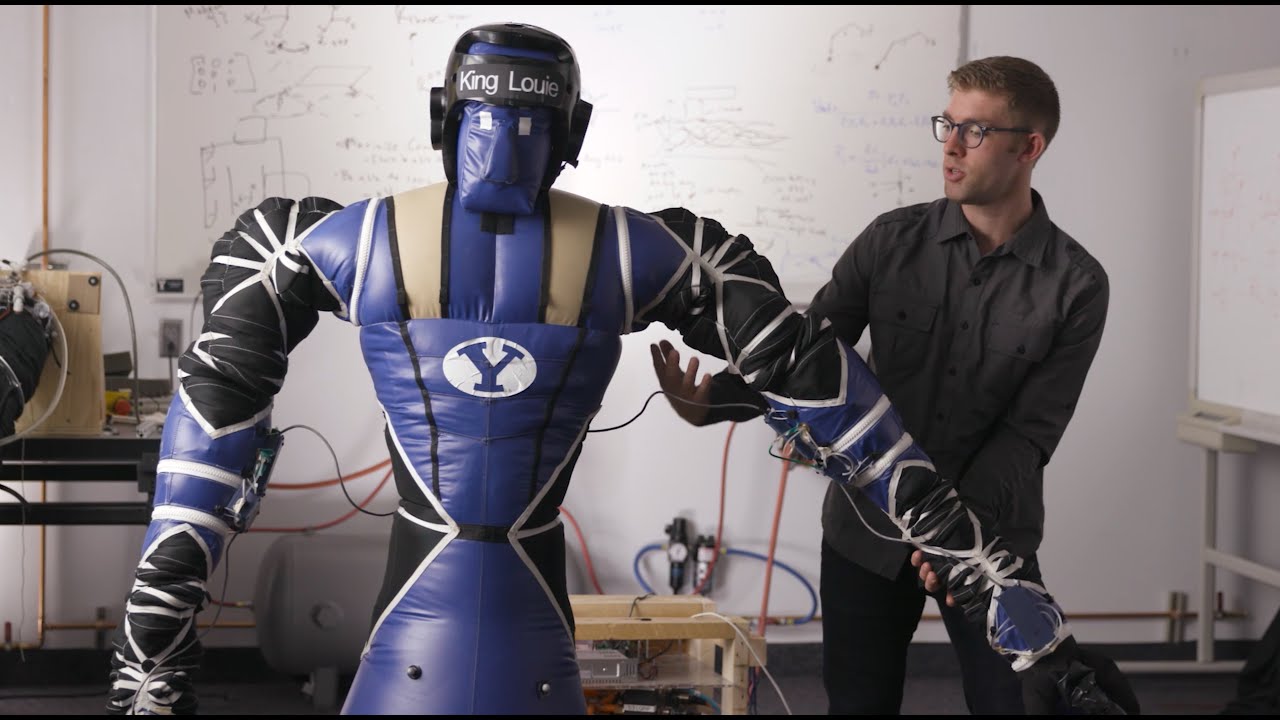
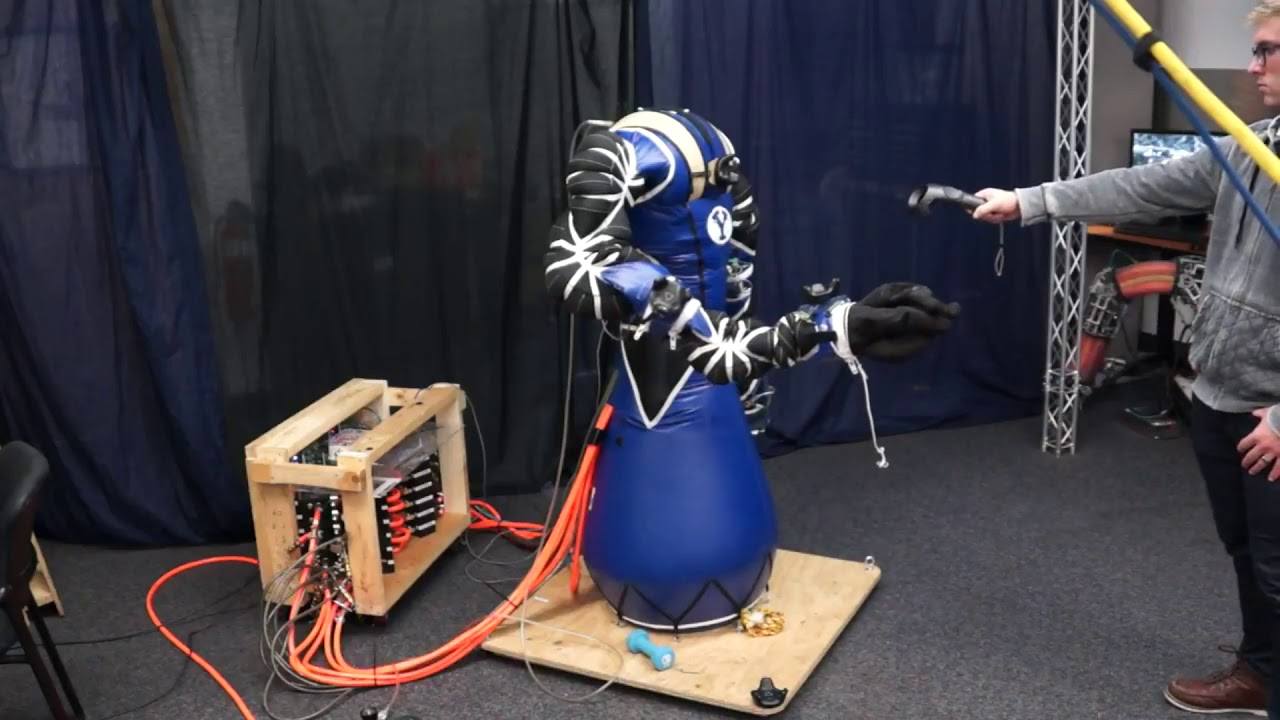
Робототехники Университета имени Бригама Янга (BYU) при финансовой поддержке аэрокосмического агентства NASA и в сотрудничестве со стартапом Pneubotics ведут разработку надувного робота King Louie («Король Луи», получил имя в честь орангутанга из мультфильма «Книга джунглей» 1967 года). Вместо металлической конструкции в нем используются надувные мешки, точный контроль давления воздуха (подается через компрессор) в которых позволяет ему передвигаться и манипулировать своими руками. Вполне возможно, что в будущем подобные машины будут использоваться на космических станциях, сообщает IEEE Spectrum.

У подобных надувных роботов есть множество ощутимых преимуществ. Они дешевле в производстве, сделаны в основном из ткани и резины и их очень легко починить. По сравнению с большинством других роботов они необычайно легкие. При необходимости их можно сделать максимально компактными (спустив воздух), чтобы не занимали много места. Кроме того, несмотря на свою «мягкотелость», они могут быть сильными и неожиданно быстрыми, поскольку, по сути, гидравлические. Возможно самым главным их преимуществом является то, что в отличии от металлических собратьев, надувные роботы полностью безопасны для человека, поскольку не используют в своей конструкции металлических элементов.
По мнению IEEE Spectrum подобные роботы однажды могут стать легкой и экономичной в вопросах работы в космосе альтернативой металлическим роботам, либо роботизированным вооружениям на вездеходах, челноках или космических станциях.

Конечно, у них есть и недостатки. Например, управление роботом King Louie зависит от четкого понимания того, какова конфигурация его конечностей и суставов в любой момент времени — надувные роботы не могут использовать те же наборы датчиков положения суставов, что используются в жестких роботах. Робототехники BYU тем не менее нашли способ направлять и обучать робота так, чтобы он знал свои габариты и соответствующие команды, несмотря на небольшие изменения, вызванные надуванием. Они оснастили руки робота маркерами из коммерческой системы отслеживания движения HTC Vive и использовали ее для оценки углов при движении.
Пожалуй, самым большим на сегодняшний момент недостатком таких роботов является их неуклюжесть и сложность в управлении. Их двигающиеся части скручиваются и изгибаются способами, которые трудно смоделировать, и каждый раз, когда робот снова спускается и надувается, его внутренняя структура и, следовательно, поведение суставов несколько отличаются.
NASA финансирует эту разработку, поскольку считает, что надувные роботы идеально подходят для освоения космоса за счет своей компактности, малой массы, долговечности, простоте ремонта и безопасности. Тем не менее их доработка до полноценного практичного использования потребует еще немало времени. Особенно, если речь идет об автономности.
Обсудить новость можно в нашем Telegram-чате.
